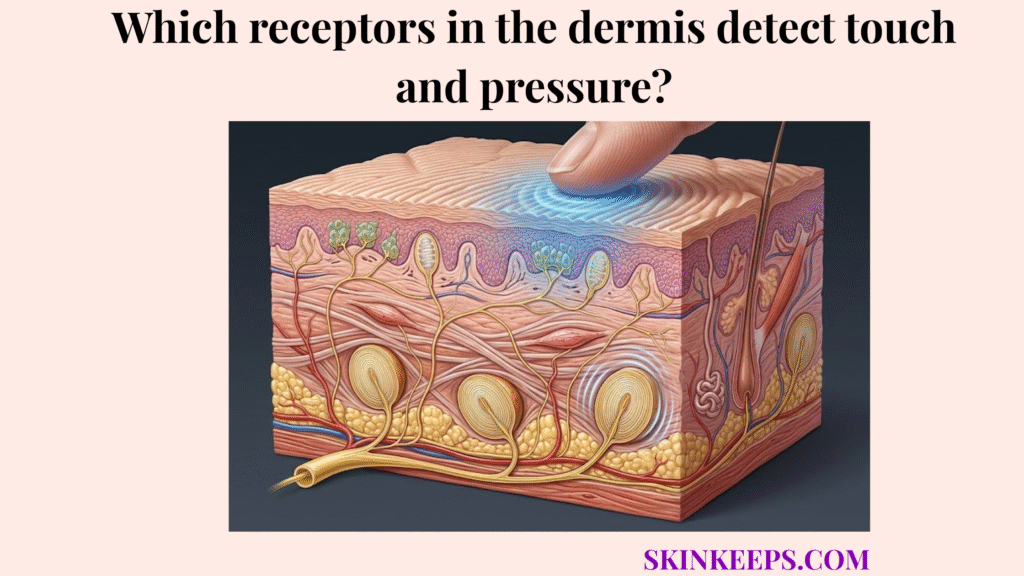
The receptors in the dermis that detect touch and pressure are primarily Meissner corpuscles, Pacinian corpuscles, and Ruffini endings, with each mechanoreceptor—a specialized sensory organ that responds to mechanical stress—specialized for a different form of mechanical input based on dermal depth, structural organization, and sensory role.
The dermis functions simultaneously as a robust connective-tissue layer and a highly responsive sensory interface. It converts environmental contact into biological data, allowing the central nervous system to monitor reality at the very edge of the body.
Receptor depth shapes what kind of force is detected most efficiently. A mechanoreceptor situated superficially intercepts delicate vibration, while an organ anchored deeply processes blunt compression and tissue stretching.
Which dermal touch and pressure receptors are the main mechanoreceptors in human skin?
The main dermal touch and pressure receptors in human skin are Meissner corpuscles, Pacinian corpuscles, and Ruffini endings, which together detect light tactile change, deep pressure, vibration, and tissue stretch.
These specialized structures operate as the definitive cutaneous mechanosensation network. Meissner corpuscles track the superficial environment, Pacinian corpuscles assess deep disturbances, and Ruffini endings gauge sustained structural shifting.
These three receptor classes differ sharply by dermal depth, stimulus profile, and functional role. Their organized arrangement prevents tactile confusion, ensuring that the skin interprets mechanical input distinctly and accurately.
This biological array prepares the body for depth-based tactile mapping. Human adult skin contains around 200,000-270,000 mechanoreceptor-linked neural fibres, and the glabrous skin of a young adult hand alone has about 17,000, establishing the dermal mechanoreceptor system as extensive rather than incidental (Frontiers, 2022).
Where are dermal touch and pressure receptors located within the skin?
Dermal touch and pressure receptors are distributed by tissue depth, with some receptors positioned close to the skin surface and others placed deeper in the dermis or near the dermal-subcutaneous boundary.
This structural arrangement dictates depth-dependent tactile specialization. Because mechanical force dissipates as it travels inward, superficial structures engage weak stimuli, whereas deep structures require stronger or highly resonant inputs to activate.
The architecture maps predictably: Meissner corpuscles occupy the papillary dermis—the superficial upper layer of the dermis, Ruffini endings reside in the reticular dermis—the deeper, thicker layer of the dermis, and Pacinian corpuscles localize at the deep dermis or dermal-subcutaneous boundary—the junction where deep dermis meets underlying fat.
Receptor anatomy drives functional capacity perfectly. RA1/Meissner receptors are located about 0.5-1 mm below the skin surface, while Pacinian corpuscles lie around 2-3 mm in the dermis, and Ruffini endings are also reported around 2-3 mm in deeper dermal tissue (Frontiers, 2022).
| Dermal level | Main receptor | Quantitative anchor | Main sensory role |
|---|---|---|---|
| Papillary / superficial dermis | Meissner corpuscles | 0.5-1 mm below skin surface | Light touch / flutter |
| Deeper dermis | Ruffini endings | ~2-3 mm | Stretch / sustained deformation |
| Deep dermis / dermal-subcutaneous border | Pacinian corpuscles | ~2-3 mm | Deep pressure / vibration |
How do Meissner corpuscles detect light touch among dermal touch and pressure receptors?
Among dermal touch and pressure receptors, Meissner corpuscles are the mechanoreceptors most specialized for low-force tactile stimulation, especially light touch, flutter, and rapid surface contact.
When investigating what detects light touch in the dermis near the surface, these distinct structures localize specifically within the papillary dermis, situating themselves immediately at the base of the epidermis where fine environmental engagement occurs.
This superficial positioning permits them to mediate high-acuity tactile discrimination—the ability to distinguish fine surface details—catching minor surface fluctuations long before the mechanical force penetrates into deeper structural tissue.
Clinically, they act as low-threshold phasic receptors, firing rapid bursts of sensory data at the onset and offset of contact. Meissner corpuscles track 10-50 Hz low-frequency sensitivity, trigger off a less than 10 μm indentation threshold, and monitor a tight 3-5 mm receptive field diameter (StatPearls, 2023).
| Attribute | Value |
|---|---|
| Dermal position | Papillary dermis / just beneath epidermis |
| Frequency sensitivity | 10-50 Hz |
| Indentation threshold | <10 μm |
| Receptive field diameter | 3-5 mm |
| Functional bias | Fine tactile discrimination |
How do Pacinian corpuscles detect deep pressure and vibration among dermal touch and pressure receptors?
Among dermal touch and pressure receptors, Pacinian corpuscles are the mechanoreceptors most specialized for deep pressure, high-frequency vibration, and rapidly changing mechanical disturbance.
These deep, encapsulated mechanoreceptors feature a distinct lamellar capsule resembling an onion, which physically filters out slow or sustained pressure stimuli to determine exactly which receptors respond to deep pressure in the dermis.
Deeper placement ensures they ignore trivial surface friction and instead transmit broader mechanical events that resonate through the entire dermal thickness.
Unlike fine-touch sensors, their rapidly adapting biology relies on single-fibre association, creating an incredibly fast but broad sensory alarm. They respond best in the 250-350 Hz high-frequency activation range, constitute 10-15% of the cutaneous receptors in the hand, and cover receptive fields that are 5-10 times larger than SA1 fields (NCBI Bookshelf, 2001) (Frontiers, 2022).
| Attribute | Value |
|---|---|
| Dermal position | Deep dermis / subcutaneous interface |
| Peak high-frequency sensitivity | 250-350 Hz |
| Share of hand cutaneous receptors | 10-15% |
| Receptive field size | ~5-10× SA1 |
| Functional bias | Deep pressure / vibration |
How do Ruffini endings detect skin stretch and sustained force among dermal touch and pressure receptors?
Among dermal touch and pressure receptors, Ruffini endings are the dermal mechanoreceptors most closely associated with skin stretch, sustained deformation—prolonged physical pressure or stretch—and prolonged tissue tension.
These deeper, elongate mechanoreceptors align parallel to collagen bundles, allowing them to stretch precisely when the surrounding dermal matrix is pulled taut.
They differ heavily from rapid-vibration receptors because they transmit signals continuously during sustained deformation rather than merely acknowledging brief contact.
However, estimating their exact abundance in human glabrous skin requires scientific caution. Ruffini endings are reported around 2-3 mm deep, they respond during both the dynamic and static phases of skin indentation, yet recent evidence suggests that only very few SA2 fibres likely innervate classical Ruffini endings in humans (Frontiers, 2022).
| Attribute | Value |
|---|---|
| Dermal position | Deeper dermis |
| Reported depth | ~2-3 mm |
| Response pattern | Dynamic + static stretch response |
| Functional bias | Skin stretch / sustained force |
| Caution note | Very few classical SA2-linked endings in humans |
How are dermal touch and pressure receptors connected to sensory nerve fibres?
Dermal touch and pressure receptors are functionally linked to afferent sensory nerve fibres, which carry mechanically encoded information from cutaneous receptor organs toward the central nervous system.
An afferent fibre acts as the singular biological wire that transports sensory data from the periphery straight to the brain for decoding.
The anatomical coupling determines the sensory resolution; some nerve fibres branch extensively to capture input from multiple tiny receptors, whereas others bind exclusively to a single massive receptor.
This distinguishes multi-organ innervation from isolated association. One RA1 fibre innervates about 10-30 Meissner corpuscles, each Meissner corpuscle is innervated by about 2-5 RA1 fibres, but only a single afferent fibre is connected to each Pacinian receptor (Frontiers, 2022).
| Receptor type | Fibre relationship | Functional implication |
|---|---|---|
| Meissner corpuscles | 10-30 corpuscles per RA1 fibre; 2-5 RA1 fibres per corpuscle | Dense fine-touch sampling |
| Pacinian corpuscles | Single afferent fibre per receptor | Large-field, deep-force signaling |
How do dermal touch and pressure receptors convert mechanical force into sensory signals?
Dermal touch and pressure receptors convert physical force into sensory information through mechanotransduction, the process by which mechanical deformation alters receptor-associated neural activity.
Mechanotransduction translates physical environmental energy into readable electrical impulses.
The sequence remains rigid: mechanical force deforms skin tissue, the receptor structure is mechanically disturbed, nerve activity changes, and the transduced signal is transmitted as tactile information.
This mechanism dictates sensory specialization perfectly. Meissner corpuscles can respond to indentations of less than 10 μm, while Merkel-cell models show neurotransmitter release can be sustained for tens of seconds under indentation, helping explain prolonged Aβ-linked signaling (PLOS Computational Biology, 2023).
| Step | Event |
|---|---|
| 1 | Mechanical force deforms skin tissue |
| 2 | Dermal receptor structure is mechanically disturbed |
| 3 | Associated sensory nerve activity changes |
| 4 | Signal is transmitted as tactile information |
How do superficial dermal touch and pressure receptors differ from deeper dermal touch and pressure receptors?
Superficial dermal touch and pressure receptors are more specialized for fine tactile discrimination, while deeper dermal receptors are more specialized for broader, stronger, or more sustained mechanical input.
Depth-dependent function separates receptors by their proximity to the exact point of contact on the epidermal surface, highlighting how receptor density varies across dermal regions of the body.
Receptor density and narrow receptive field spacing allow superficial receptors to pinpoint exact textures, resolving minute spatial details efficiently.
Deeper receptors lack this spatial resolution but offset it with broad-field signaling that registers powerful, diffuse impact. The finger pad density is about 100 SA1 units/cm² and about 150 RA1 units/cm², with centre-to-centre spacing roughly 1 mm for SA1 and 0.82 mm for RA1, while Pacinian receptive fields are about 5-10 times larger than SA1 fields (Frontiers, 2022).
| Depth category | Main receptors | Quantitative anchor | Functional bias |
|---|---|---|---|
| Superficial dermis | Meissner-linked type 1 units | ~150 RA1 units/cm²; spacing ~0.82 mm | Fine tactile discrimination |
| Superficial epidermal-ridge comparison | SA1 / Merkel-linked units | ~100 SA1 units/cm²; spacing ~1 mm | Static detail / pressure contour |
| Deeper dermis | Ruffini endings, Pacinian corpuscles | Pacinian fields ~5-10× SA1 | Stretch / deep pressure / vibration |
How do dermal touch and pressure receptors differ from Merkel-cell touch detection?
Dermal touch and pressure receptors differ from Merkel-cell touch detection because Merkel cells are epidermal sensory cells located in the basal epidermal ridge system, whereas Meissner corpuscles, Pacinian corpuscles, and Ruffini endings are mechanoreceptors located within the dermis.
This anatomical distinction isolates epidermal sensation perfectly from deep connective-tissue reception.
Functionally, the Merkel cell-neurite complex distinguishes itself by monitoring prolonged, static indentations rather than reacting solely to vibration or skin stretching.
Merkel cells work with Aβ afferents to transmit sustained light-pressure signaling continuously. Merkel-related SA1 units are located about 0.5-1 mm below the skin surface, respond up to 100 Hz, are most sensitive between 0.3 and 5 Hz, and combine with Aβ afferents to support sustained transmitter release for tens of seconds under indentation (PLOS Computational Biology, 2023).
| Sensory structure | Main location | Quantitative anchor | Main role |
|---|---|---|---|
| Merkel cells / SA1 system | Basal epidermal ridge system | 0.5-1 mm depth; up to 100 Hz; most sensitive 0.3-5 Hz | Sustained fine touch / static detail |
| Meissner corpuscles | Papillary dermis | 10-50 Hz; <10 μm threshold | Light touch / flutter |
| Pacinian corpuscles | Deep dermis | 250-350 Hz | Deep pressure / vibration |
| Ruffini endings | Deeper dermis | ~2-3 mm depth | Stretch / sustained deformation |
What are the key takeaways about dermal touch and pressure receptors?
The key facts about dermal touch and pressure receptors are that the dermis contains multiple specialized mechanoreceptor classes, each class is tuned to a different category of mechanical input, and tactile perception depends on receptor depth, structural specialization, and sensory nerve coupling.
Quick Answers About Dermal Touch and Pressure Receptors
Which receptors in the dermis detect touch and pressure?
The primary receptors in the dermis that detect touch and pressure are Meissner corpuscles, Pacinian corpuscles, and Ruffini endings. Each cutaneous mechanoreceptor converts mechanical deformation into tactile neural input.
Which dermal receptor detects light touch?
Meissner corpuscles detect light touch. They are situated 0.5-1 mm below the surface and transmit low-frequency vibration and fine tactile discrimination.
Which dermal receptor detects deep pressure?
Pacinian corpuscles detect deep pressure. They localize in the deep dermis roughly 2-3 mm down, employing a lamellar capsule to translate broad mechanical input.
Which dermal receptor detects vibration?
Pacinian corpuscles specialize in detecting high-frequency vibration. They react robustly within the 250-350 Hz range due to their rapidly adapting structural organization.
Which dermal receptor detects skin stretch?
Ruffini endings detect skin stretch. These elongate mechanoreceptors respond during dynamic and static phases to convey sustained tissue tension.
Are Merkel cells dermal receptors?
No, Merkel cells are not dermal receptors. They are epidermal sensory cells located in the basal epidermal ridge system that associate with Aβ afferent nerve fibres.
Why does receptor depth matter in tactile function?
Receptor depth dictates spatial resolution and stimulus bias. Superficial placement supports fine tactile discrimination, while deep positioning supports broad-field signaling and deep force detection.
What is mechanotransduction in skin receptors?
Mechanotransduction is the precise biological process where physical tissue deformation alters a receptor, modifying neural activity to transmit an encoded sensory signal to the brain.
Conclusion
In conclusion, dermal touch and pressure receptors form a depth-organized mechanoreceptor system in which Meissner corpuscles, Pacinian corpuscles, and Ruffini endings detect different categories of mechanical force and convert those forces into tactile neural signals.
By organizing these structures from the superficial papillary dermis to the deep dermal-subcutaneous boundary, the skin ensures that delicate tactile discrimination and heavy sustained deformation are handled by entirely different organs. Tactile perception ultimately depends on this structured mechanotransduction array transmitting encoded data through afferent sensory nerve fibres, rather than on a single generic touch receptor.